Research
Credit: Yuanzhuo Xiang
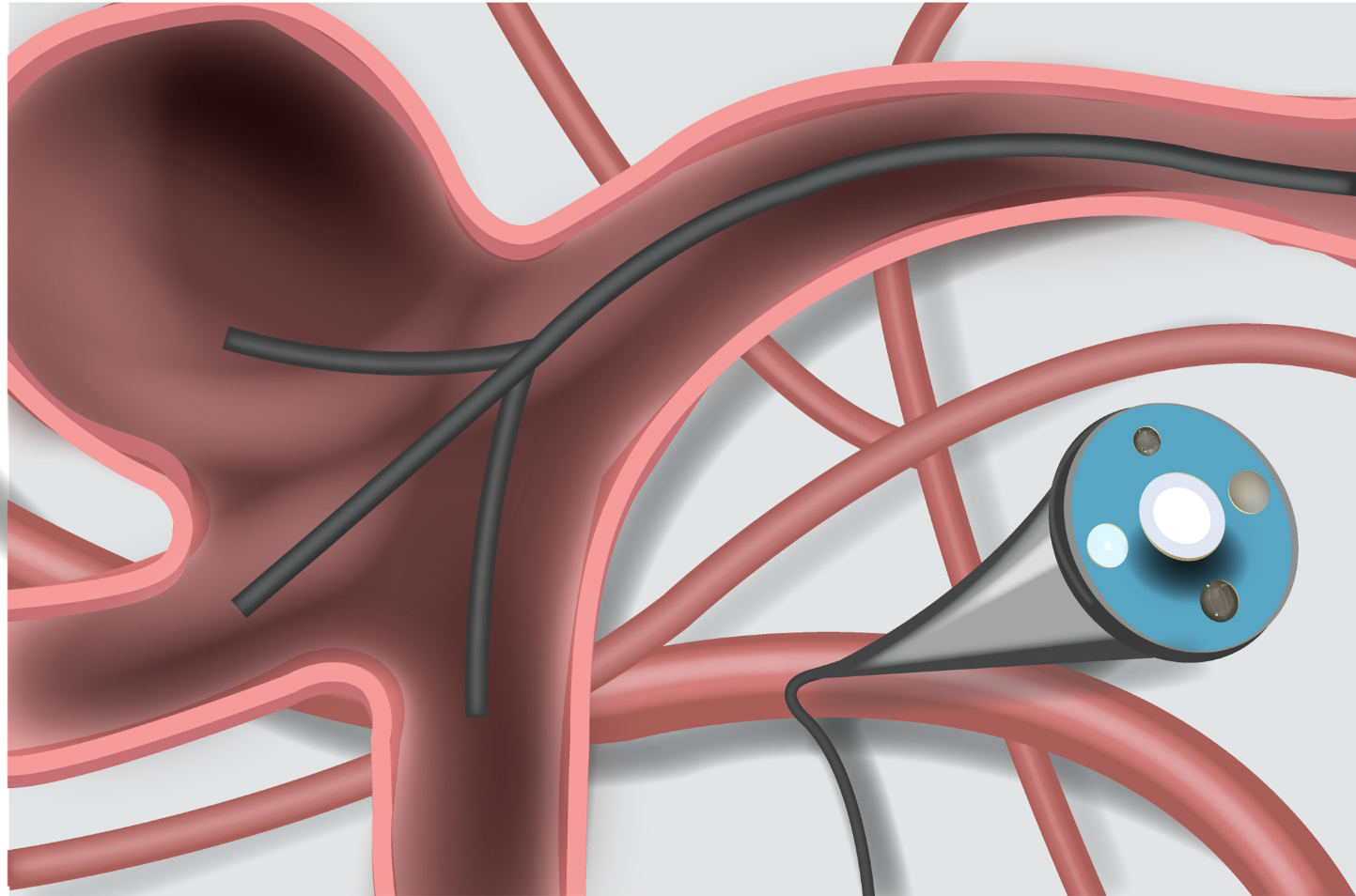
Minimally invasive medical fiberbots bridging distal physiological panels with proximal actuation, manipulation, and perception modalities enable the potential to explore interventional learning by maximizing their capability to autonomously navigate, collect data, and react/adapt to complex environments in vivo. To address the clinical challenges in minimally invasive interventions, based on advanced functional fiber manufacturing strategies and interdisciplinary efforts with fields such as materials science, optics, and biomedical engineering, we fabricated flexible, maneuverable, and biocompatible fiberbots, and realizing fiberbots with capabilities of active navigation and steering, as well as various manipulation modes such as mid-infrared laser ablation, photodynamic therapy, pulsed field ablation, radio frequency ablation, electrical stimulation, microfluidic delivery, and robotic embolization, thus paving a novel technical routes for existing minimally invasive medical surgical procedures and expands their application in precision medicine.